目前我国城市里的十字路口交通系统大部分都采用定时方式来控制(不排除繁忙路段或高峰时段用交警来取代交通灯的情况),这样必然产生如下弊端:当某条路段的车流量很大时却要等待红灯,而此时另一条是空道或车流量相对少得多的道却长时间亮的是绿灯,这种以多等少的尴尬现象是未对实际情况进行实时监控所造成的,不仅让司机乘客怨声载道,而且对人力和物力资源也是一种浪费。
智能控制交通系统是目前研究的方向,也已经取得不少成果,在少数几个先进国家已采用智能方式来控制交通信号,其中主要运用GPS全球定位系统等。出于便捷和效果的综合考虑,可用如下方案来控制交通路况:制作传感器探测车辆数量来控制交通灯的时间。具体如下:在入路口的各个方向附近的地下按要求埋设感应线圈,当汽车经过时就会产生涡流损耗,环状绝缘电线的电感开始减少,即可检测出汽车的通过,并将这一信号转换为标准脉冲信号作为可编程控制器的控制输入,并用PLC计数,按一定控制规律自动调节红绿灯的时长。
比较传统的定时交通灯控制与智能交通灯控制,可知后者的最大优点在于减缓滞流现象,也不会出现空道占时的情形,提高了公路交通通行率,较全球定位系统而言成本更低。
1车辆的存在与通过的检测
(1)感应线圈(电感式传感器)。电感式传感器其主要部件是埋设在公路下十几厘米深处的环状绝缘电线(特别适合新铺道路,可用混凝土直接预埋,老路则需开挖再埋)。当有高频电流通过电感时,公路面上就会形成如图1(a)所示虚线所形成的高频磁场。当汽车进入这一高频磁场区时,汽车就会产生涡流损耗,环状绝缘电线的电感开始减少。当汽车正好在该感应线圈的正上方时,该感应线圈的电感减到最小值。当汽车离开这高频磁场区时,该感应线圈电感逐渐复原到初始状态。由于电感变化该感应线圈中流动的高频电流的振幅(本论文所涉及的检测工作方式)和相位发生变化,因此,在环的始端连接上检测相位或振幅变化的检测器,就可得到汽车通过的电信号。若将环状绝缘电线作为振荡电路的一部分,则只要检测振荡频率的变化即可知道汽车的存在和通过。
电感式传感器的高频电流频率为60kHz,尺寸为2×3m,电感约为100μH.这种传感器可检测的电感变化率在0.3%以上。电感式传感器安装在公路下面,从交通安全和美观考虑,
它是理想的传感器。传感器最好选用防潮性能好的原材料。
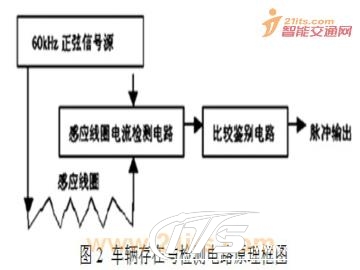
(2)电路。检测汽车存在的具体实现是在感应线圈的始端连接上检测电感电流变化的检测器,并将之转化为标准脉冲电压输出。其具体电路图由3部分组成:信号源部分、检测部分、比较鉴别部分。原理框图如图2所示,输出脉冲波形如图1(b)所示。
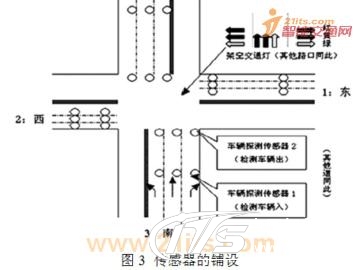
(3)传感器的铺设。车辆计数是智能控制的关键,为防止车辆出现漏检的现象,环状绝缘电线在地下的铺设采取在每个车行道上中的出口地(停车线处)以及在离出口地一定远的进口的地方,各铺设一个相同的传感器,方案如图3所示(以典型的十子路口为例),同一股道上的两传感器相距的距离为该股道正常运行时所允许的最长停车车龙为好。

2.用PLC实现智能交通灯控制
(1)控制系统的组成
车辆的流量记数、交通灯的时长控制可由可编程控制器(PLC)来实现。当然,也可选用其他种类的计算机作为控制器。文中选用PLC作为控制器件是因为可编程控制器核心是一台计算机,它是专为工业环境应用而设计制造的计算机。它具有丰富的输入/输出接口,并且具有较强的驱动能力;它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程;它采用模块化结构,编程简单,安装简单,维修方便。
利用PLC,可使上述描叙的各传感器以及各道口的信号灯与之直接相连,非常方便。本设计例中,PLC选用FX2N-64,其输入端接收来自各个路口的车辆探测器测得的输出标准电脉冲,输出接十字路口的红绿信号交通灯。信号灯的选择:在本例中选用红、黄、绿发光二极管作为信号灯(箭头方向型)。
(2)车流量的计量
车流量的计量有多种方式:(1)每股行车道的车流量通过PLC分别统计。当车辆进入路口经过第一个传感器1时,使统计数加1,经过第二个传感器2出路口时,使统计数减1,其差值为该股车道上车辆的滞留量(动态值),可以与其他道的值进行比较,据此作为调整红绿灯时长的依据。(2)先统计每股车道上车辆的滞留量,然后按大方向原则累加统计。如,将东西向的左行、直行、右行道上的车辆的滞留量相加,再与其它的3个方向的车流量进行比较,据此作为调整红绿灯时长的依据。(3)统计每股车道上车辆的滞留量后按通行最大化原则(不影响行车安全的多道相向行驶)累加统计。如,东、西相向的2个左行、直行、右行道上的车辆的滞留量全部相加,再与南北向的总车流量进行比较,据此作为调整红绿灯时长的依据(下面的例子就是按此种方式)。以上计算判别全部由PLC完成。可以把以上不同计量判别方式编成不同的子程序,方便调用。
(3)程序控制方法
文中就上述所描述的车流量统计方式,就图3中的十字路口给出一例PLC自动调整红绿灯时长的程序控制方法,其行车顺序与现实生活中执行的一样,只是时间长短不一样。
1)当各路口的车辆滞留量达一定值溢满时(相当于比较严重的堵车),红绿灯切换采用现有的常规定时控制方式。
2)当东、西向路口的车辆滞留量比南、北向路口的大时(反之亦然),该方向的通行时间=最小通行定时时间+自适应滞环比较增加的延时时间(是变化的),但不大于允许的最大通行时间。其中最小定时时间是为了避免红绿灯切换过快之弊;最大通行时间是为了保障公平性,不能让其它的车或行人过分久等。进一步的说明在后面的注释中。
3)自适应滞环比较(本例的核心控制规律)增加的时间的确定若东、西向车辆滞留量≥南、北向一个偏差量σ(如30辆车或其它值)时,先让东、西向的左转弯车左行15s(定时控制,值可改),再让直行车直行30s(直行时间的最小值,值可改)后再加一段延时保持,直至东、西向的车辆滞留量比南、北向的车辆滞留量还要少一个偏差量σ,才结束该方向的通行,切换到其它路上,否则一直延时继续通行下去,直至到达最大通行时间而强制切换。实际应用时σ的值需整定,过小则导致红绿灯切换过频,过大又不能实现适时控制。
3.结束语
与传统的定时交通灯控制相比,智能交通控制的最大优点在于减缓滞流现象,也不会出现空道占时的情形,提高了道路交通通行率,较全球定位系统而言成本更低,特别适合繁忙的、未立交的交通路口,更适合于四个以上的路口,也可方便连网。

声明:
凡文章来源标明“中国智能交通网”的文章版权均为本站所有,请不要一声不吭地来拿走,转载请注明出处,违者本网保留追究相关法律责任的权利;所有未标明来源为“中国智能交通网”的转载文章均不代表本网立场及观点,“中国智能交通网”不对这些第三方内容或链接做出任何保证或承担任何责任。
征稿:
为了更好的发挥中国智能交通网资讯平台价值,促进诸位自身发展以及业务拓展,更好地为企业及个人提供服务,中国智能交通网诚征各类稿件,欢迎有实力的企业、机构、研究员、行业分析师投稿。投稿邮箱: itsshenzhen@163.com (查看征稿详细)