1、引言
交通违法行为检测属于智能监控中高层次的内容,是事件检测、行为的理解和描述的一种表现形式。相对来说,以前大多数的研究都集中在运动检测和跟踪等底层视觉问题上,这方面的研究较少。近年来,经济与道路交通的快速发展,机动车保有量持续攀升,交通违法行为也同步增加,这就对道路交通管理提出了更高的要求。关于这方面的研究也渐成热点。
传统应用中,多以传感器方式有针对性的监控处理各类交通违法行为,此种方式有些代价昂贵,如雷达、激光;有些需要破坏路面、定期更换设备,如地感线圈。在同时处理多种违法类型时也常常束手,这使其越来越不适应当前交通管理应用趋势。
本文以图像处理算法为基础,结合模式识别原理,根据车辆轨迹对车辆交通行为进行分析,极大地提高了道路安全部门对无人值守路口违法行为的监控力度,并大幅降低了工程实现成本。
2、算法流程及轨迹获取
2.1算法流程框架
本文首先通过车辆视频检测算法获取目标初始信息,采用均值漂移算法结合卡尔曼滤波算法实现目标的视频跟踪,再对其轨迹进行统计分析,获取目标实际行驶方向的轨迹特征,并以现场规则(信号灯状态、车道属性及导向规则等)为辅助,做出违法行为判定。
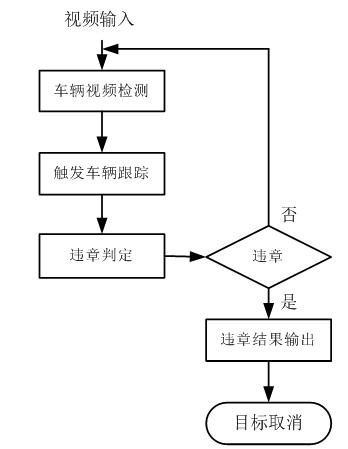
图一交通违法行为检测算法流程
2.2视频检测
视频触发是根据智能图像识别后的车辆运动检测结果,对经过监控车道的所有车辆进行自动背向抓拍。其中车辆运动检测结果综合了运动帧差信息、车辆特征(车牌、车辆尾部结构特征和AdaBoost训练特征等)以及车辆的跟踪状态,最后形成车辆到达和离开状态的判断,具备较好的实时性和稳定性。
2.3车辆视频跟踪
视频跟踪是在目标车辆离开视频触发区域后我们获取其实时位置信息的有效方式。均值漂移算法(Mean-shift)[2]是一种非参数概率密度估计算法,可以通过迭代快速地收敛于概率密度函数的局部最大值,因此在目标实时跟踪领域有着很高的应用价值。
Mean-shift算法本身是通过对目标原始区域的不断迭代去寻找最佳匹配候选目标,当目标运动速度较大时,很容易发生冗余迭代或局部收敛,针对此种情况,我们采用Kalman滤波[3]对每个目标运动过程进行建模,通过Kalman预测缩小迭代范围,减少计算量,同时降低噪声影响,得到目标的最优估计。
2.4轨迹获取及示例
我们将目标车辆进入视场到离开视场的轨迹进行保存,并以此作为后续进行交通违法行为分析的基础数据,根据《道路交通安全违法行为图像取证技术规范(2009)》对关键帧的交通信号灯状态予以保存,设定现场参数,如停止线位置,车道线位置,车道导向规则,道路禁行标志等。
下图为截取现场处理的轨迹图。

图二现场轨迹图

声明:
凡文章来源标明“中国智能交通网”的文章版权均为本站所有,请不要一声不吭地来拿走,转载请注明出处,违者本网保留追究相关法律责任的权利;所有未标明来源为“中国智能交通网”的转载文章均不代表本网立场及观点,“中国智能交通网”不对这些第三方内容或链接做出任何保证或承担任何责任。
征稿:
为了更好的发挥中国智能交通网资讯平台价值,促进诸位自身发展以及业务拓展,更好地为企业及个人提供服务,中国智能交通网诚征各类稿件,欢迎有实力的企业、机构、研究员、行业分析师投稿。投稿邮箱: itsshenzhen@163.com (查看征稿详细)